
Posted on October 10th, 2008

The Aim
The CAUV 2008 is an Autonomous Underwater Vehicle that has been designed to compete in the Student Autonomous Underwater Challenge - Europe (SAUC-E). It is one of the smallest robots at the competition weighing in at just under 7kg. It makes use of the world's smallest full-featured x86 mainboard, the Pico-ITX, to power the autonomy software which guides it through an underwater assault course.

The SAUC-E competition is a Europe wide competition aimed at University level students. The teams design and build their own AUVs that must attempt an underwater assault course that may vary from year to year but can consist of gates, drop targets and surface zones that may have to be detected by visual or acoustic means.
The Preparation
AUV Specification:
- 1 GHz EPIA PX 10000 mainboard
- 1 GB RAM
- 4GB CF Card
- 2 x Logitech Quickcam Pro 4000
- 4 x Internal vector thrusters*
- 1 x 100W Brushless Motor
- 5 x 30A MAG8 electric speed controllers
- 1 x Belkin Wireless USB Adapter
- 1 x Inertial Measurement Unit*
- 12 x 2400mAHr LiPol Batteries
- 1 x M3-ATX picoPSU 125W
- Battery Management System*
- Carbon Fibre Hull*
- Aluminium Connectors*
Items marked with (*) are ones we have built ourselves.
Calculations using a basic fluid dynamics model show that our AUV should be able to reach a maximum speed of around 4.2m/s and a maximum range of 40km at a cruising speed of 2.4m/s.

The AUV is 1.1 meters long and has a 90mm diameter with 4 internal vectored thrusters to provide manoeuvrability and a 100W rear propeller for high speed cruising. The AUV has full control over yaw, pitch, forward, sideways and vertical movement; roll is controlled passively by the low centre of gravity. The main sensors include an Inertial Measurement Unit; two cameras and pressure sensors. All this hardware is controlled by the high level decision software, written in Java and run on the Pico-ITX.
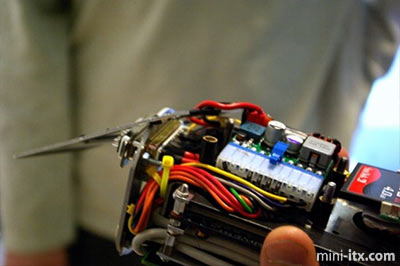
The Pico-ITX setup uses a 1 GHz processor, 1GB RAM, a 4GB CompactFlash as the storage device and an M3-ATX Wide Input PICO-PSU. The Pico-ITX has been fitted into an easily removable module that slides into the central section of the AUV. The central section contains the heart of the AUV consisting of the Pico-ITX, the battery module, the INS and the central hub. The central hub is a set of connectors that break through the carbon fibre hull, that various payloads can be plugged into, such as a marker dropping system, an acoustic modem or a side scan sonar.
To communicate with the AUV we have two options, firstly the tether, a long Ethernet cable that attaches to a waterproof connector on the top of the AUV. Secondly we have an 802.11g wireless USB adapter in the vehicles nose cone, allowing for surface communication.


The PICO testing rig used for software debugging. On the AUV we use Ubuntu Server 8.04.

The processor module drying out in the sun after an unintended bath. Ooops.


Spot the difference.
 |
 |
 |
Quick Links
Mailing Lists:
Mini-ITX Store
Projects:
Show Random
Accordion-ITX
Aircraft Carrier
Ambulator 1
AMD Case
Ammo Box
Ammo Tux
AmmoLAN
amPC
Animal SNES
Atari 800 ITX
Attache Server
Aunt Hagar's Mini-ITX
Bantam PC
BBC ITX B
Bender PC
Biscuit Tin PC
Blue Plate
BlueBox
BMW PC
Borg Appliance
Briefcase PC
Bubbacomp
C1541 Disk Drive
C64 @ 933MHz
CardboardCube
CAUV 2008
CBM ITX-64
Coelacanth-PC
Cool Cube
Deco Box
Devilcat
DOS Head Unit
Dreamcast PC
E.T.PC
Eden VAX
EdenStation IPX
Encyclomedia
Falcon-ITX
Florian
Frame
FS-RouterSwitch
G4 Cube PC
GasCan PC
Gingerbread
Gramaphone-ITX-HD
GTA-PC
Guitar PC
Guitar Workstation
Gumball PC
Hirschmann
HTPC
HTPC2
Humidor 64
Humidor CL
Humidor II
Humidor M
Humidor PC
Humidor V
I.C.E. Unit
i64XBOX
i-EPIA
iGrill
ITX Helmet
ITX TV
ITX-Laptop
Jeannie
Jukebox ITX
KiSA 444
K'nex ITX
Leela PC
Lego 0933 PC
Legobox
Log Cabin PC
Lunchbox PC
Mac-ITX
Manga Doll
Mantle Radio
Mediabox
Mega-ITX
Micro TV
Mini Falcon
Mini Mesh Box
Mini-Cluster
Mobile-BlackBox
Moo Cow Moo
Mr OMNI
NAS4Free
NESPC
OpenELEC
Osh Kosh
Pet ITX
Pictureframe PC
Playstation 2 PC
Playstation PC
Project NFF
PSU PC
Quiet Cubid
R2D2PC
Racing The Light
RadioSphere
Restomod TV
Robotica 2003
Rundfunker
SaturnPC
S-CUBE
SEGA-ITX
SpaceCase
SpacePanel
Spartan Bluebird
Spider Case
Supra-Server
Teddybear
Telefunken 2003
TERA-ITX
The Clock
ToAsTOr
Tortoise Beetle
Tux Server
Underwood No.5
Waffle Iron PC
Windows XP Box
Wraith SE/30
XBMC-ION