
Posted on October 10th, 2008

Our GUI software showing the two image streams as well as the telemetry window and message log in the background.

Some more of the GUI.

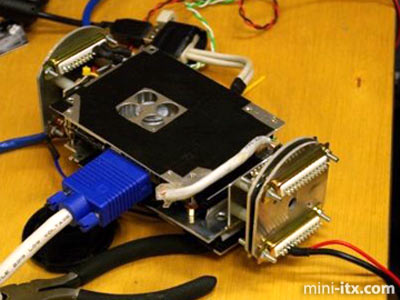
When the PICO module was first tested in the hull we disovered that it didn�t like being in such a confined space with resticted airflow and would peridoically cut out to protect itself from overheating, and we certainly didn�t want this happening 10 meters underwater with no way of contacting it. Replacing the standard heat transfer pads with our own thermal paste and fitting some side mounted fans to the module solved this problem. Although, this could have been caused by not replacing the heat sink properly after we changed the holding screws.


A day of testing a few weeks before the competition at the underwater stage at Pinewood Studios.

One of the great things about building a light AUV is that it can fit into a RC helicopter case and be carried around easily. And when the AUV is in the water the travel case is excellent for keep the beers cool.
The Results

Overall, using the Pico-ITX was a great decision and was one of the most reliable systems on the AUV. We are looking forward to stringing together a couple of Mobile-ITX boards to get some parallel processing going. But in the mean time we will be working on the Pico-ITX to perfect the operation of our AUV.
- Our problem solving skills were tested day and night and we managed to fix the majority of problems.
- We were the lightest AUV, but not by as much as last year, one of the French teams has shrunk their AUV down to 15kg.
- We built 90% of the AUV from scratch. Thruster motors were hand wound. Most PCBs designed in-house. Moulds for CF done on lathe, same for Aluminium connectors. Image recognition, Hough transforms, Canny edge detection, colour segmentation from scratch.
- We used LiPol batteries and got them working with our own battery management module.
- We won a prize: Special Award for Innovation in Systems Engineering from DCNS.
- We have had some salt water pool testing
For more information visit http://www.cambridgeauv.co.uk
 |
 |
 |
Quick Links
Mailing Lists:
Mini-ITX Store
Projects:
Show Random
Accordion-ITX
Aircraft Carrier
Ambulator 1
AMD Case
Ammo Box
Ammo Tux
AmmoLAN
amPC
Animal SNES
Atari 800 ITX
Attache Server
Aunt Hagar's Mini-ITX
Bantam PC
BBC ITX B
Bender PC
Biscuit Tin PC
Blue Plate
BlueBox
BMW PC
Borg Appliance
Briefcase PC
Bubbacomp
C1541 Disk Drive
C64 @ 933MHz
CardboardCube
CAUV 2008
CBM ITX-64
Coelacanth-PC
Cool Cube
Deco Box
Devilcat
DOS Head Unit
Dreamcast PC
E.T.PC
Eden VAX
EdenStation IPX
Encyclomedia
Falcon-ITX
Florian
Frame
FS-RouterSwitch
G4 Cube PC
GasCan PC
Gingerbread
Gramaphone-ITX-HD
GTA-PC
Guitar PC
Guitar Workstation
Gumball PC
Hirschmann
HTPC
HTPC2
Humidor 64
Humidor CL
Humidor II
Humidor M
Humidor PC
Humidor V
I.C.E. Unit
i64XBOX
i-EPIA
iGrill
ITX Helmet
ITX TV
ITX-Laptop
Jeannie
Jukebox ITX
KiSA 444
K'nex ITX
Leela PC
Lego 0933 PC
Legobox
Log Cabin PC
Lunchbox PC
Mac-ITX
Manga Doll
Mantle Radio
Mediabox
Mega-ITX
Micro TV
Mini Falcon
Mini Mesh Box
Mini-Cluster
Mobile-BlackBox
Moo Cow Moo
Mr OMNI
NAS4Free
NESPC
OpenELEC
Osh Kosh
Pet ITX
Pictureframe PC
Playstation 2 PC
Playstation PC
Project NFF
PSU PC
Quiet Cubid
R2D2PC
Racing The Light
RadioSphere
Restomod TV
Robotica 2003
Rundfunker
SaturnPC
S-CUBE
SEGA-ITX
SpaceCase
SpacePanel
Spartan Bluebird
Spider Case
Supra-Server
Teddybear
Telefunken 2003
TERA-ITX
The Clock
ToAsTOr
Tortoise Beetle
Tux Server
Underwood No.5
Waffle Iron PC
Windows XP Box
Wraith SE/30
XBMC-ION