
The Azimut 2 Omnidirectional Robot
January 06, 2006
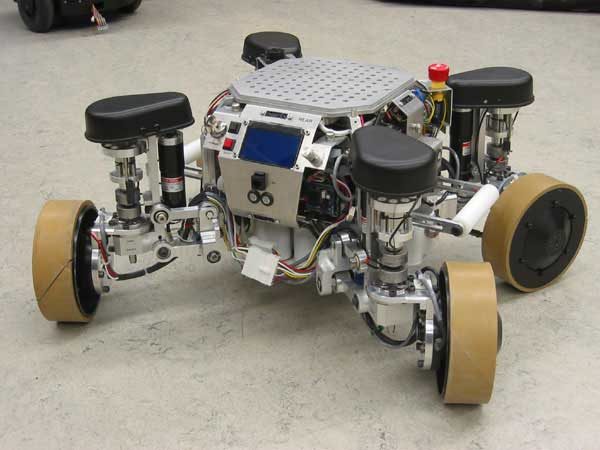
Robomotio, and the Laborious Mobile Robotics research laboratory at Sherbrooke University in Quebec have completed their "Azimut 2" Omnidirectional robotic platform.
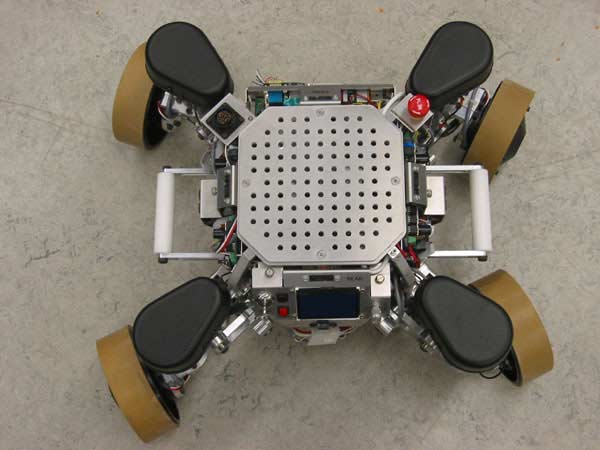
The Azimut 2 is powered by two 24V NiMH battery packs and an external power tether, with an elastic actuator, vertical suspension system and high efficiency brushless motor and gearbox driving each wheel. The result is four independent directed wheels, suitable for operation over both flat surfaces and uneven terrains. The Azimut 2 can change the direction of these wheels through 180 degrees, making the robot capable of moving sideways without changing its heading. That's the omnidirectional part.
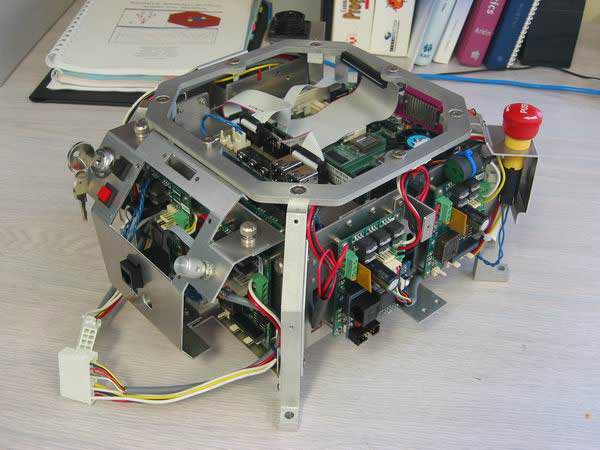
The Mini-ITX part (of course) is the Pentium M Mini-ITX motherboard providing high-level processing functionality, which in turn drives the low-level controllers through a shared 1 Mbps CAN bus.
Specifications: Overall Dimensions: 60 x 52 x 29 cm; Weight: 35 kg; Max Slope: 35�; Payload: 34Kg; Max Speed: 5.3 km/h; Max Direction System Speed: 180 �/s; Direction System Continuous Torque: 9.8 Nm; Max Wheel Torque: 8.5 Nm; Wheel Diameter: 16 cm.
Recent Stories
• Commodore OS Vision 3.0 Released 22 Apr 25
• KUBIC is a Nintendo-themed Mini-ITX case you can 3D Print 15 Jul 24
• MILK-V's Jupiter Mini-ITX Board powered by RISC-V 05 Jul 24
• AMD’s Ryzen 8000G CPUs - the perfect choice for smaller Mini-ITX builds? 17 Jan 24
• Intel Hands Over the NUC Reins to ASUS 06 Sep 23
• NA500 Network Appliances now available 24 May 23
• Expanded range of Dynatron Coolers now available from Mini-ITX.com 08 Feb 23
• The Commodore 64x - modern Mini-ITX inside a retro enclosure 07 Jul 22
• The Turing Pi V2 - now on Kickstarter 16 May 22
• AMD announce Ryzen 4000 "G " Series with Integrated Graphics 21 Jul 20
News Archives
 |
 |
 |
Quick Links
Mailing Lists:
Mini-ITX Store
Projects:
Show Random
Accordion-ITX
Aircraft Carrier
Ambulator 1
AMD Case
Ammo Box
Ammo Tux
AmmoLAN
amPC
Animal SNES
Atari 800 ITX
Attache Server
Aunt Hagar's Mini-ITX
Bantam PC
BBC ITX B
Bender PC
Biscuit Tin PC
Blue Plate
BlueBox
BMW PC
Borg Appliance
Briefcase PC
Bubbacomp
C1541 Disk Drive
C64 @ 933MHz
CardboardCube
CAUV 2008
CBM ITX-64
Coelacanth-PC
Cool Cube
Deco Box
Devilcat
DOS Head Unit
Dreamcast PC
E.T.PC
Eden VAX
EdenStation IPX
Encyclomedia
Falcon-ITX
Florian
Frame
FS-RouterSwitch
G4 Cube PC
GasCan PC
Gingerbread
Gramaphone-ITX-HD
GTA-PC
Guitar PC
Guitar Workstation
Gumball PC
Hirschmann
HTPC
HTPC2
Humidor 64
Humidor CL
Humidor II
Humidor M
Humidor PC
Humidor V
I.C.E. Unit
i64XBOX
i-EPIA
iGrill
ITX Helmet
ITX TV
ITX-Laptop
Jeannie
Jukebox ITX
KiSA 444
K'nex ITX
Leela PC
Lego 0933 PC
Legobox
Log Cabin PC
Lunchbox PC
Mac-ITX
Manga Doll
Mantle Radio
Mediabox
Mega-ITX
Micro TV
Mini Falcon
Mini Mesh Box
Mini-Cluster
Mobile-BlackBox
Moo Cow Moo
Mr OMNI
NAS4Free
NESPC
OpenELEC
Osh Kosh
Pet ITX
Pictureframe PC
Playstation 2 PC
Playstation PC
Project NFF
PSU PC
Quiet Cubid
R2D2PC
Racing The Light
RadioSphere
Restomod TV
Robotica 2003
Rundfunker
SaturnPC
S-CUBE
SEGA-ITX
SpaceCase
SpacePanel
Spartan Bluebird
Spider Case
Supra-Server
Teddybear
Telefunken 2003
TERA-ITX
The Clock
ToAsTOr
Tortoise Beetle
Tux Server
Underwood No.5
Waffle Iron PC
Windows XP Box
Wraith SE/30
XBMC-ION